ロボットプログラミング生徒様作品 2足歩行ロボット
教室長の中川です。
本日は、ロボットプログラミング教室の生徒さん作品「2足歩行ロボット」を紹介します。😄
まずは動画をご覧ください。
このように、なんと「8本」ものサーボモーターをバランスをとって動作させています。
左足、右足と繰り替えし(ループ)処理で動かし続けています。
プログラム自体は簡単なのですが、モーターの角度を調整してバランスをとるのが難しいです。
ロボットが2本足で立つ構造、重心の位置の移動などをレッスンで考えながらプログラミングしていくということを行っています。
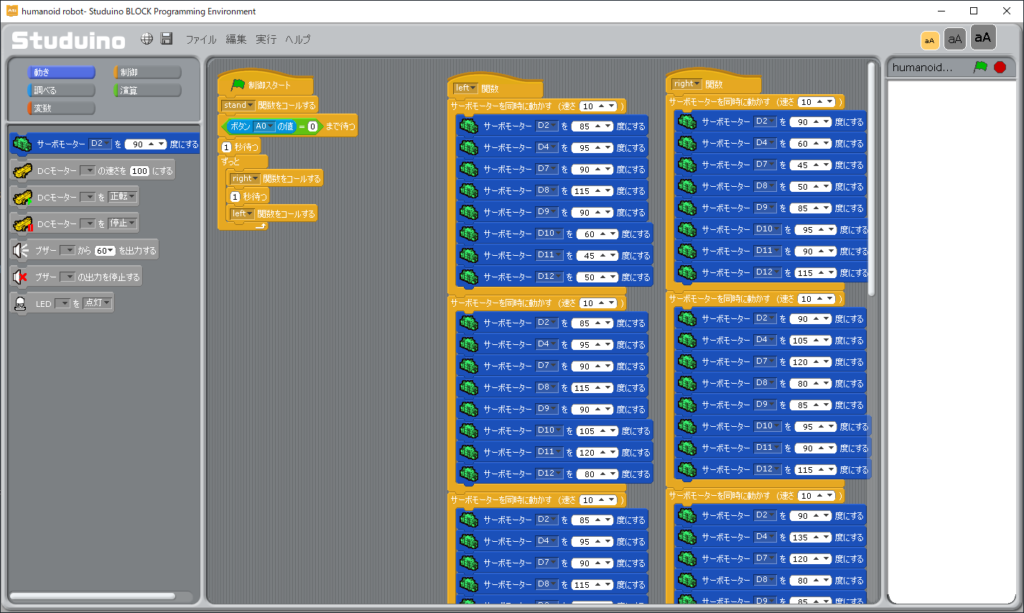
プログラムはこんな感じです。
5度単位で細かくプログラムを調整してくれているのがお分かりいただけるかと思います。
サーボモーターを”○”度にする
という命令で、モーターを指定の角度まで動作させ、止める事ができます。
これを一連の流れにして、関数化(処理をまとめる)して、ずっとで繰り替えを行っているのです。(ループ処理)
2足歩行ロボットプログラミング
子供たちには、このように実際にモノを動かし楽しみながら、ロボットの機構や電流のこと、プログラムのことを自発的に学んでもらっています。
もちろん一回でうまくいかないので、何度も試行錯誤(トライ&エラー)を繰り返し、最終的に成功するものを作り上げるということをやっております。
うまくいったときの喜びはひとしおです😆
京都 長岡京パソコンスクールでプログラミングを学ぶなら キュリオステーション長岡天神店へお越しください